LiPo Vs NiMH Battery: Which One is Right for You?

In the comparison between LiPo and NiMH batteries, LiPo takes the first position for providing high power output and NiMH …
In the comparison between LiPo and NiMH batteries, LiPo takes the first position for providing high power output and NiMH …

For a brand-new LiPo battery, read the manufacturer’s instructions to understand the battery’s specifications. Based on the information, charge the …

RC cars work based on radio signals, power sources and controllers. The radio signal from the controller activates the car’s …

For realism, better speed and longer run time, nitro engines are attractive to many RC enthusiasts. Similar to real cars, …

Most LiPo batteries in RC vehicles typically provide their optimal performance for 18 months. They last up to 3 years …

Like real cars, RC cars require a routine cleaning or a wash after usage for better performance and longevity. Cleaning …

Storing a LiPo battery with proper safety is crucial to enhance its lifespan and prevent unwanted fire hazards. Moreover, careful …
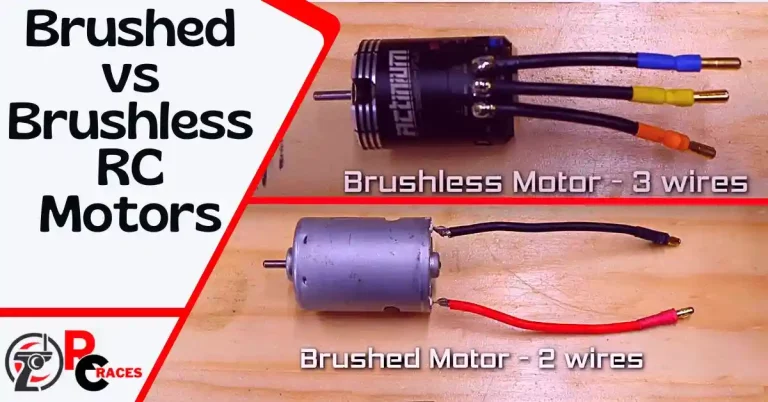
Technically, brushless motors are more advanced, durable and faster than brushed motors. But this simple theory does not mean that …

Traxxas batteries may not receive charge because of several reasons. Some are relevant to the battery itself; others are linked …

The time it takes to charge an RC car battery depends on the battery type. On average, NiMH batteries take …